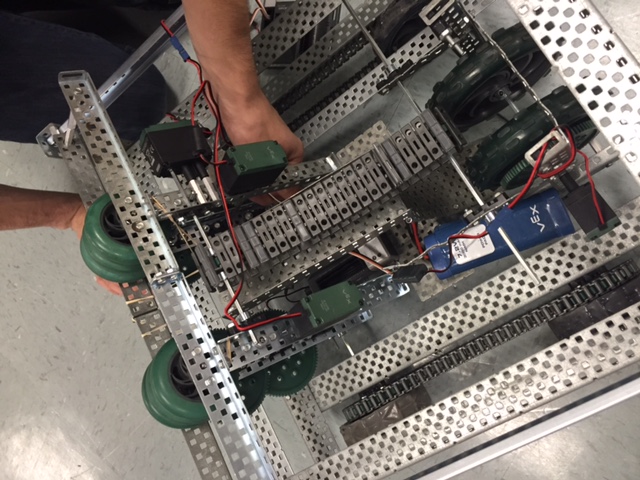
Today we attached rubber bands to the edge of the lift so that the lift flexes and allows the ball enter the launcher but now another problem we are facing is that only one set of wheels to the launcher is moving and we believe that this is due to the brain so we tested a new brain and it wasn't a brain issue. Micheal also fixed up the code to the robot so the controls to work the robot are easier. Will and Nick since they finished the challenge already is somewhat assisting us by giving us parts so that we can complete the challenge.